Projects¶
Evaluation of transfer learning for roadside driving behavior in autonomous robots¶
Master’s thesis · Universidad de los Andes (MISIS) · Defended June 6, 2025
Evaluated transfer learning between deep reinforcement-learning agents on a roadside-driving (lane-change) task: transferring the knowledge of a previously trained TD3 self-driving policy to a new agent that has to start its task from scratch. The self-driving policies themselves were trained on a TurtleBot3 in Gazebo, with CARLA also explored as an alternative simulator. Promotor: Nicolás Cardozo.
Fig. 3.7 — TurtleBot3 in the Gazebo roundabout testbed; the blue cone represents the LiDAR scan sweeping the simulated environment.¶
Highlights
Three formal transfer-learning metrics evaluated: Transfer Ratio, Mastery, and Pedagogy.
Transfer ratio of 0.9401 when reusing a pre-trained expert (vs 1.1455 for an agent learning both paradigms simultaneously) — substantial knowledge preservation.
~53% fewer training steps (70 vs 149) to reach competence compared to learning from scratch.
A gradient-transfer variant cut training time by 44.3% (1.929 h vs 3.461 h baseline).
TD3 (Twin Delayed Deep Deterministic Policy Gradient) for continuous control of the robot’s linear and angular velocities — used as the underlying RL algorithm for both source and target agents.
Integrated ROS2 topics for sensor input (LiDAR, odometry) and actuation.
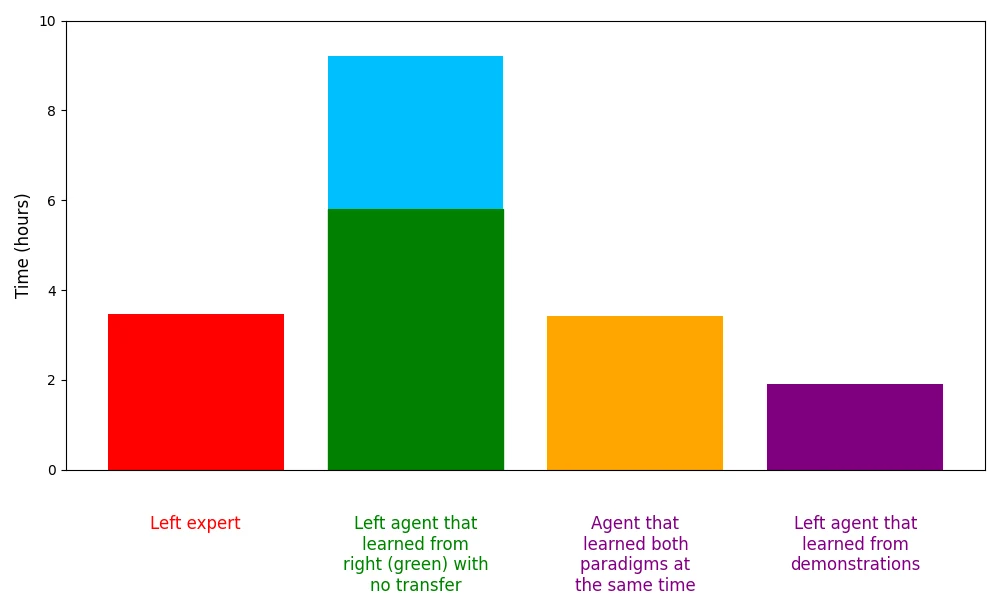
Fig. 4.8 — Training time of the four evaluated agents. The transfer-learning agent (purple) reaches competence in ~1.9 h versus ~3.5 h for the left-side expert trained from scratch.¶
The CARLA simulator was also explored as an alternative urban-driving environment using a Cybertruck model in Town 5.

Fig. 3.2 — Cybertruck model placed in CARLA’s Town 5, used as the alternative urban-driving testbed.¶